Engineering problems, built solutions.
I'm a Mechanical Engineering student at the University at Buffalo, with a focus on robotics, mechanical design,
modeling, and rapid prototyping. I thrive in the middle of design and hardware —
where an idea on paper becomes something that physically works.
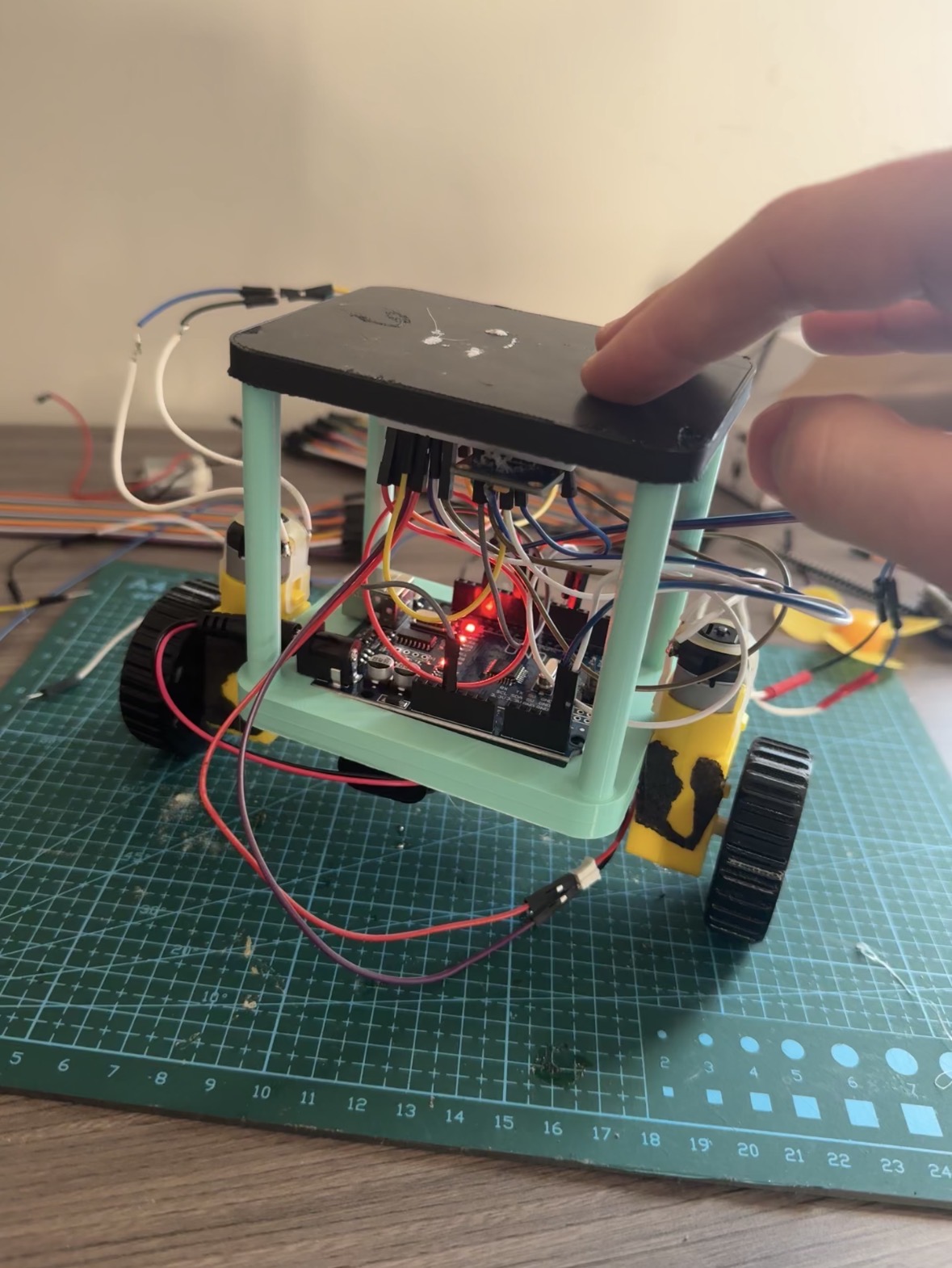
My work spans from CAD modeling in Fusion 360 and SolidWorks, embedded programming with Arduino and
Raspberry Pi, to full mechanical fabrication. I enjoy the full cycle: concept, design, build, test, iterate.
Currently working on a prosthetic hand personal project, where im translating servo actuation with a four bar linkage system that controls the tension in wires that go through each finger allowing independant movement of each finger.
Degree
B.S. Mechanical Engineering
University
University at Buffalo
Graduating
May 2027
Location
Buffalo, NY | Queens, NY
Email
feliperi@buffalo.edu
Focus
Robotics · Control Systems · CAD